Prospective Learning: Back to the Future
Jan 1, 1010
Object Representations Guided By Optical Flow
Jan 1, 1010
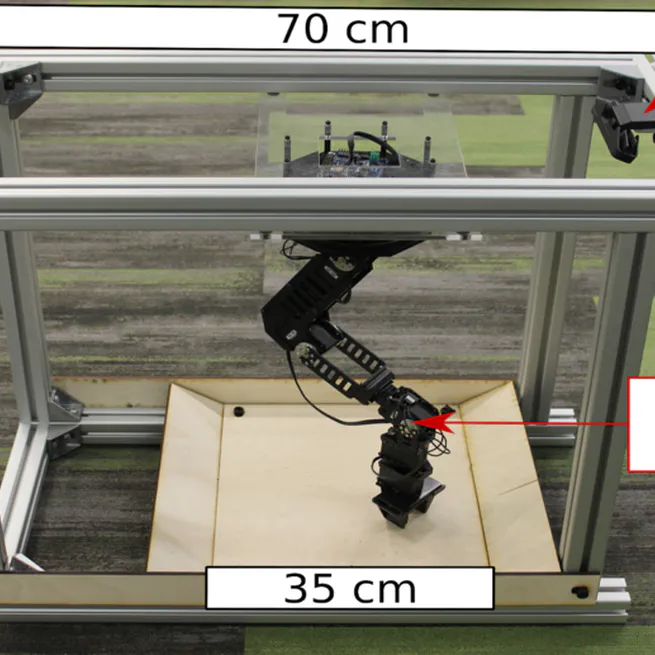
REPLAB: A Reproducible Low-Cost Arm Benchmark Platform for Robotic Learning
We propose a low-cost compact easily replicable hardware stack for manipulation tasks, that can be assembled within a few hours. We also provide implementations of robot learning algorithms for grasping (supervised learning) and reaching (reinforcement learning). Contributions invited!
Jan 1, 1010