Training Robots to Evaluate Robots: Example-Based Interactive Reward Functions for Policy Learning
Sep 13, 13130

An Exploration of Embodied Visual Exploration
Mar 1, 1010
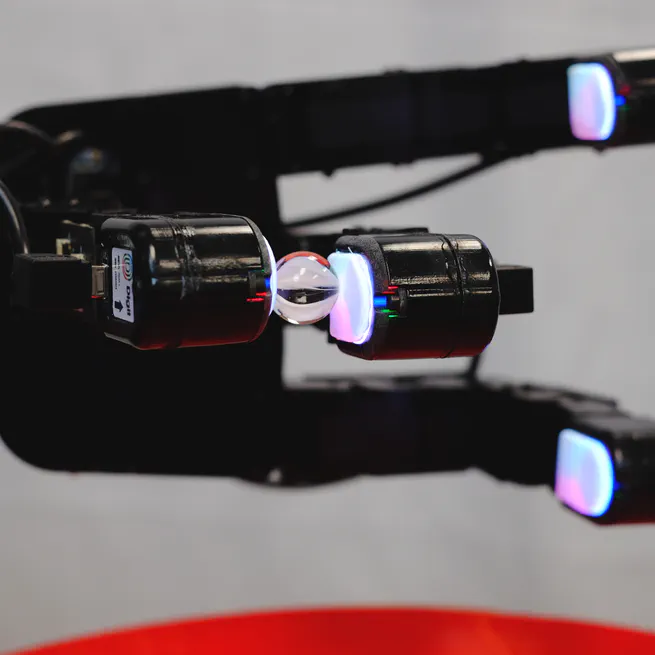
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
We design and demonstrate a new tactile sensor for in-hand tactile manipulation in a robotic hand.
May 17, 17170
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
High-resolution tactile sensing together with visual approaches to prediction and planning with deep neural networks enables high-precision tactile servoing tasks.
Jan 1, 1010
Emergence of Exploratory Look-Around Behaviors Through Active Observation Completion
Jan 1, 1010
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
By exploiting high precision tactile sensing with deep learning, robots can effectively iteratively adjust their grasp configurations to boost grasping performance from 65% to 94%.
Jan 1, 1010
Learning to Look Around: Intelligently Exploring Unseen Environments for Unknown Tasks
Task-agnostic visual exploration policies may be trained through a proxy "observation completion" task that requires an agent to "paint" unobserved views given a small set of observed views.
Jan 1, 1010
End-to-End Policy Learning For Active Visual Categorization
Active visual perception with realistic and complex imagery can be formulated as an end-to-end reinforcement learning problem, the solution to which benefits from additionally exploiting the auxiliary task of action-conditioned future prediction.
Jan 1, 1010
Learning Image Representations Tied to Egomotion from Unlabeled Video
An agent's continuous visual observations include information about how the world responds to its actions. This can provide an effective source of self-supervision for learning visual representations.
Jan 1, 1010
Embodied Learning for Visual Recognition
Jan 1, 1010
Pano2Vid: Automatic Cinematography For Watching 360-degree Videos
By exploiting human-uploaded web videos as weak supervision, we may train a system that learns what good videos look like, and tries to automatically direct a virtual camera through precaptured 360-degree videos to try to produce human-like videos.
Jan 1, 1010
Look-Ahead Before You Leap: End-to-End Active Recognition By Forecasting the Effect of Motion
Active visual perception with realistic and complex imagery can be formulated as an end-to-end reinforcement learning problem, the solution to which benefits from additionally exploiting the auxiliary task of action-conditioned future prediction.
Jan 1, 1010
Learning Image Representations Tied to Egomotion
An agent's continuous visual observations include information about how the world responds to its actions. This can provide an effective source of self-supervision for learning visual representations.
Jan 1, 1010