
REPLAB: A Reproducible Low-Cost Arm Benchmark Platform for Robotic Learning
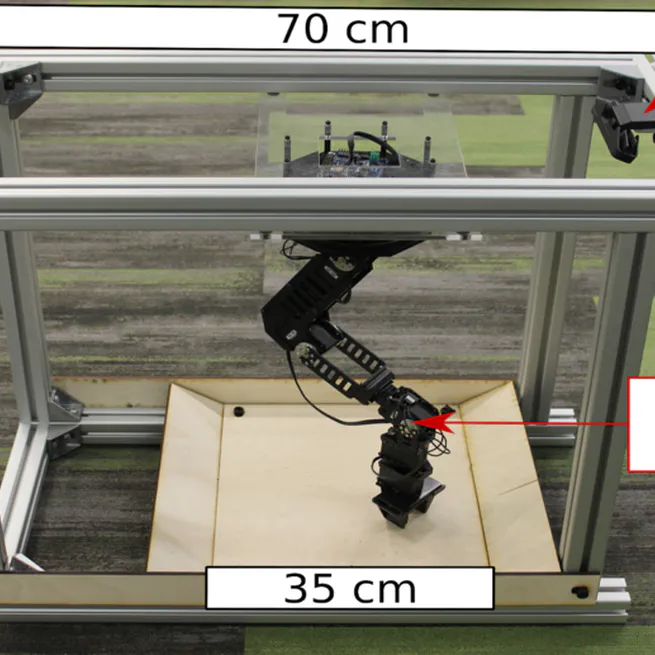
We propose a low-cost compact easily replicable hardware stack for manipulation tasks, that can be assembled within a few hours. We also provide implementations of robot learning algorithms for grasping (supervised learning) and reaching (reinforcement learning). Contributions invited!
Jan 1, 1010
REPLAB: A Reproducible Low-Cost Arm Benchmark Platform for Robotic Learning
We propose a low-cost compact easily replicable hardware stack for manipulation tasks, that can be assembled within a few hours. We also provide implementations of robot learning algorithms for grasping (supervised learning) and reaching (reinforcement learning). Contributions invited!
Jan 1, 1010
Objective Quality Assessment of Multiply Distorted Images
Image quality assessment datasets have heretofore focused on specific individual distortions rather than a more natural mix of different degrees of various kinds of distortions. We synthesize a dataset to study this latter setting, and compare various existing algorithms.
Jan 1, 1010