Model-Based Inverse Reinforcement Learning from Visual Demonstrations
We learn reward functions in unsupervised object keypoint space, to allow us to follow third-person demonstrations with model-based RL.
Oct 15, 15150
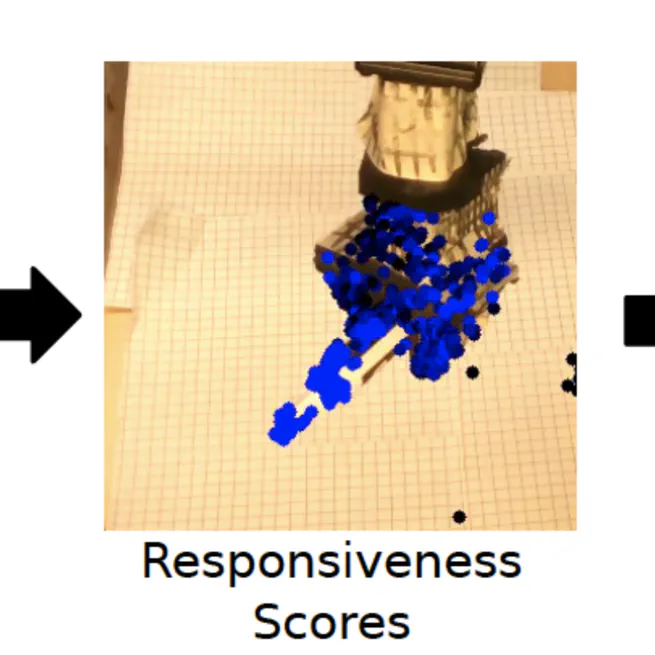
MAVRIC: Morphology-Agnostic Visual Robotic Control
We demonstrate visual control within 20 seconds on a robot with unknown morphology, from a single uncalibrated RGBD camera.
May 17, 17170
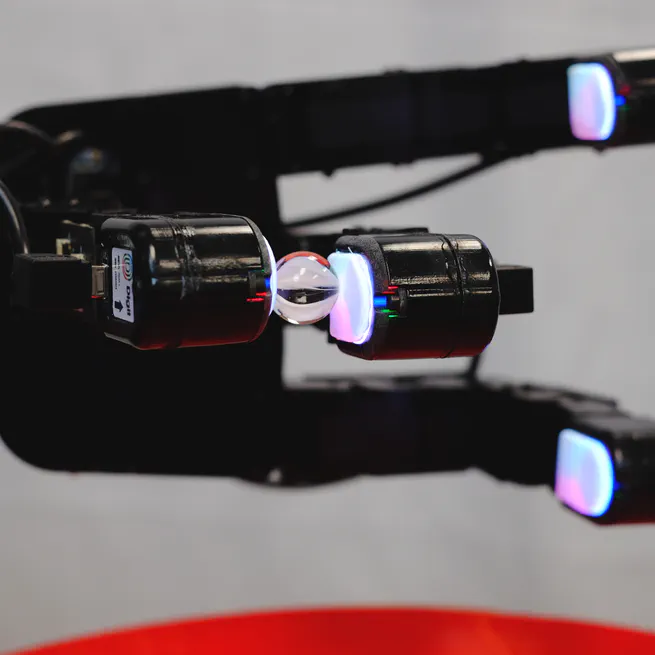
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
We design and demonstrate a new tactile sensor for in-hand tactile manipulation in a robotic hand.
May 17, 17170

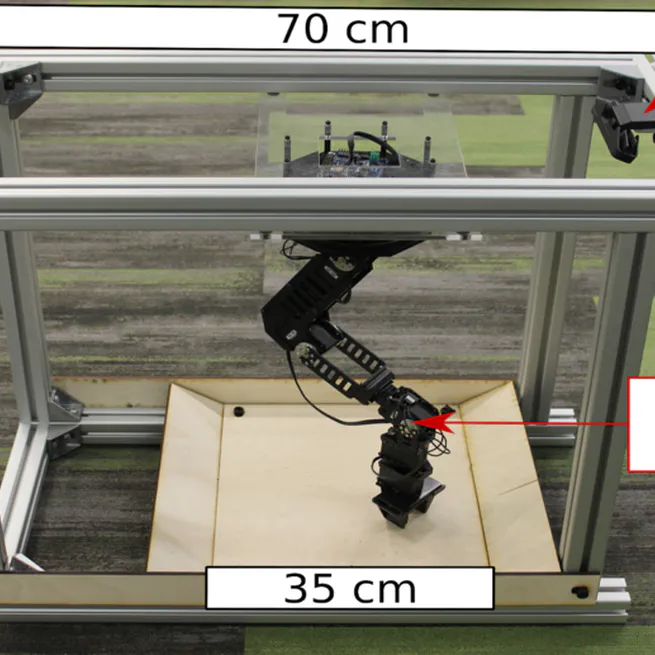
REPLAB: A Reproducible Low-Cost Arm Benchmark Platform for Robotic Learning
We propose a low-cost compact easily replicable hardware stack for manipulation tasks, that can be assembled within a few hours. We also provide implementations of robot learning algorithms for grasping (supervised learning) and reaching (reinforcement learning). Contributions invited!
Jan 1, 1010
REPLAB: A Reproducible Low-Cost Arm Benchmark Platform for Robotic Learning
We propose a low-cost compact easily replicable hardware stack for manipulation tasks, that can be assembled within a few hours. We also provide implementations of robot learning algorithms for grasping (supervised learning) and reaching (reinforcement learning). Contributions invited!
Jan 1, 1010
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
High-resolution tactile sensing together with visual approaches to prediction and planning with deep neural networks enables high-precision tactile servoing tasks.
Jan 1, 1010
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
By exploiting high precision tactile sensing with deep learning, robots can effectively iteratively adjust their grasp configurations to boost grasping performance from 65% to 94%.
Jan 1, 1010