Know Thyself: Transferable Visuomotor Control Through Robot-Awareness
Jan 4, 4040
Model-Based Inverse Reinforcement Learning from Visual Demonstrations
We learn reward functions in unsupervised object keypoint space, to allow us to follow third-person demonstrations with model-based RL.
Oct 15, 15150
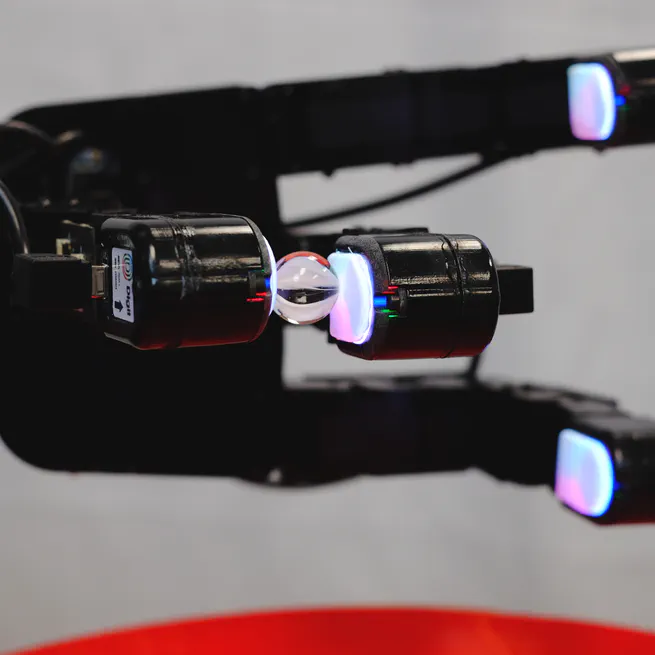
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
We design and demonstrate a new tactile sensor for in-hand tactile manipulation in a robotic hand.
May 17, 17170
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
High-resolution tactile sensing together with visual approaches to prediction and planning with deep neural networks enables high-precision tactile servoing tasks.
Jan 1, 1010