Conservative and Adaptive Penalty for Model-Based Safe Reinforcement Learning
Jan 1, 1010
Long-Horizon Visual Planning with Goal-Conditioned Hierarchical Predictors
To plan towards long-term goals through visual prediction, we propose a model based on two key ideas: (i) predict in a goal-conditioned way to restrict planning only to useful sequences, and (ii) recursively decompose the goal-conditioned prediction task into an increasingly fine series of subgoals.
Jun 1, 1010
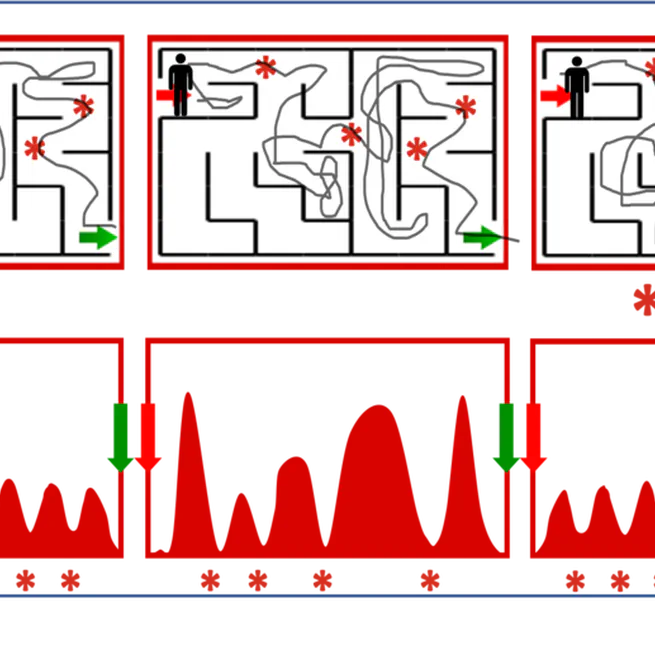
Cautious Adaptation For Reinforcement Learning in Safety-Critical Settings
How to train RL agents safely? We propose to pretrain a model-based agent in a mix of sandbox environments, then plan pessimistically when finetuning in the target environment.
Jun 1, 1010
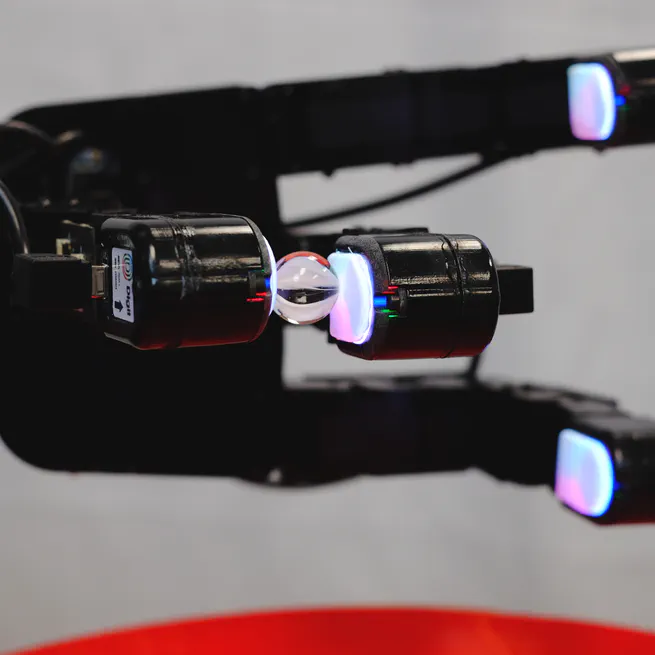
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
We design and demonstrate a new tactile sensor for in-hand tactile manipulation in a robotic hand.
May 17, 17170
Time-Agnostic Prediction: Predicting Predictable Video Frames
In visual prediction tasks, letting your predictive model choose which times to predict does two things: (i) improves prediction quality, and (ii) leads to semantically coherent "bottleneck state" predictions, which are useful for planning.
Jan 1, 1010
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
High-resolution tactile sensing together with visual approaches to prediction and planning with deep neural networks enables high-precision tactile servoing tasks.
Jan 1, 1010
End-to-End Policy Learning For Active Visual Categorization
Active visual perception with realistic and complex imagery can be formulated as an end-to-end reinforcement learning problem, the solution to which benefits from additionally exploiting the auxiliary task of action-conditioned future prediction.
Jan 1, 1010
Learning Image Representations Tied to Egomotion from Unlabeled Video
An agent's continuous visual observations include information about how the world responds to its actions. This can provide an effective source of self-supervision for learning visual representations.
Jan 1, 1010
Embodied Learning for Visual Recognition
Jan 1, 1010
Slow and Steady Feature Analysis: Higher Order Temporal Coherence in Video
Assuming a world that mostly changes smoothly, continuous video streams entail implicit supervision that can be effectively exploited for learning visual representations.
Jan 1, 1010
Look-Ahead Before You Leap: End-to-End Active Recognition By Forecasting the Effect of Motion
Active visual perception with realistic and complex imagery can be formulated as an end-to-end reinforcement learning problem, the solution to which benefits from additionally exploiting the auxiliary task of action-conditioned future prediction.
Jan 1, 1010
Learning Image Representations Tied to Egomotion
An agent's continuous visual observations include information about how the world responds to its actions. This can provide an effective source of self-supervision for learning visual representations.
Jan 1, 1010