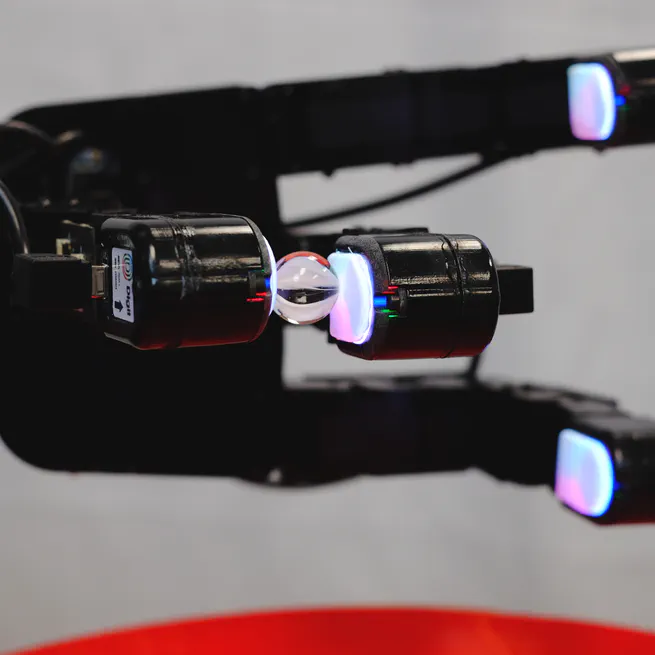
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
We design and demonstrate a new tactile sensor for in-hand tactile manipulation in a robotic hand.
May 17, 17170
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
High-resolution tactile sensing together with visual approaches to prediction and planning with deep neural networks enables high-precision tactile servoing tasks.
Jan 1, 1010
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
By exploiting high precision tactile sensing with deep learning, robots can effectively iteratively adjust their grasp configurations to boost grasping performance from 65% to 94%.
Jan 1, 1010