Long-Horizon Visual Planning with Goal-Conditioned Hierarchical Predictors
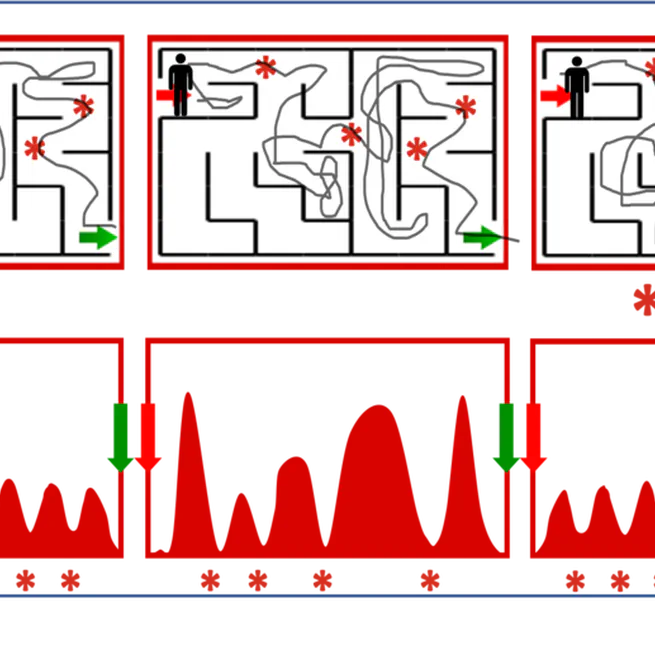
To plan towards long-term goals through visual prediction, we propose a model based on two key ideas: (i) predict in a goal-conditioned way to restrict planning only to useful sequences, and (ii) recursively decompose the goal-conditioned prediction task into an increasingly fine series of subgoals.
Jun 1, 1010
Time-Agnostic Prediction: Predicting Predictable Video Frames
In visual prediction tasks, letting your predictive model choose which times to predict does two things: (i) improves prediction quality, and (ii) leads to semantically coherent "bottleneck state" predictions, which are useful for planning.
Jan 1, 1010