Long-Horizon Visual Planning with Goal-Conditioned Hierarchical Predictors
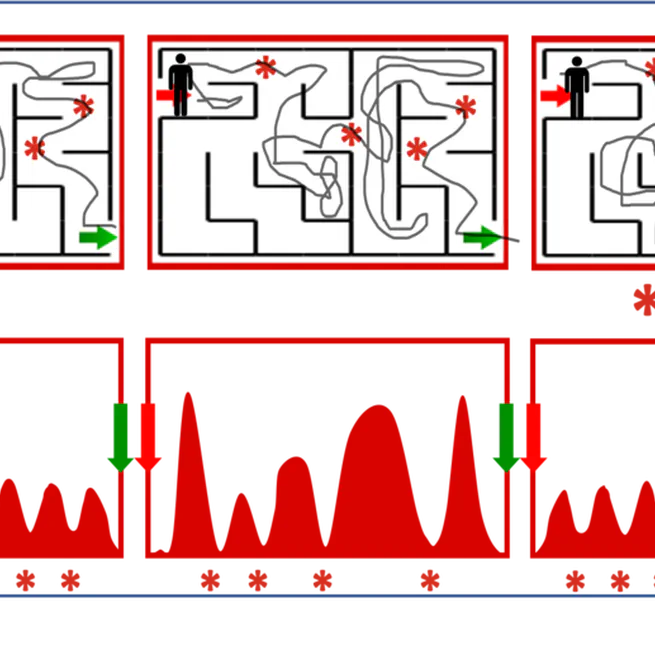
To plan towards long-term goals through visual prediction, we propose a model based on two key ideas: (i) predict in a goal-conditioned way to restrict planning only to useful sequences, and (ii) recursively decompose the goal-conditioned prediction task into an increasingly fine series of subgoals.
Jun 1, 1010
Time-Agnostic Prediction: Predicting Predictable Video Frames
In visual prediction tasks, letting your predictive model choose which times to predict does two things: (i) improves prediction quality, and (ii) leads to semantically coherent "bottleneck state" predictions, which are useful for planning.
Jan 1, 1010
Object-Centric Representation Learning from Unlabeled Videos
Unsupervised feature learning from video benefits from paying attention to changes in appearance of objects detected by an objectness measure, rather than only paying attention to the whole scene.
Jan 1, 1010