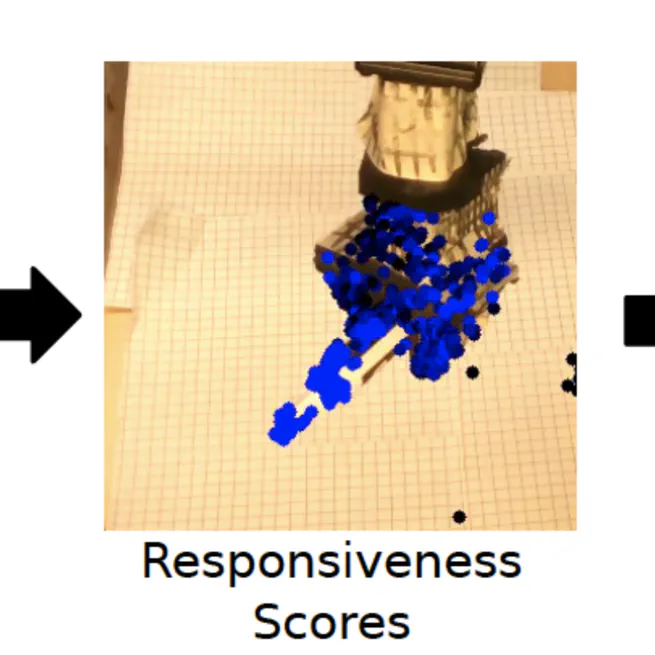
We demonstrate visual control within 20 seconds on a robot with unknown morphology, from a single uncalibrated RGBD camera.
May 17, 17170