
4.2. Setup and Walk-through¶
4.2.1. Vectorization¶
We will divide the computation into vectors that run on the NEON units in our ARM cores. Fig. 4.1 shows the high level block diagram of the ARM core in Ultra96 board.

The Ultra96 boards have ARM Cortex A-53 cores. It’s a 2-way decode, in-order core with one 64-bit NEON SIMD unit, as shown in Table 4.1.
Cortex A-53 |
|
|---|---|
ARM ISA |
ARMv8 (32/64-bit) |
Decoder Width |
2 micro-ops |
Maximum Pipeline Length |
8 |
Integer Add |
2 |
Integer Mul |
1 |
Load/Store Units |
1 |
Branch Units |
1 |
FP/NEON ALUs |
1x64-bit |
L1 Cache |
8KB-64KB I$ + 8KB-64KB D$ |
L2 Cache |
128KB - 2MB (Optional) |
We will use the NEON Intrinsics API to program the NEON Units in our cores. An intrinsic behaves syntactically like a function, but the compiler translates it to a specific instruction that is inlined in the code. In the following sections, we will guide you through reading the NEON Programmer’s guide and learning to use these APIs.
4.2.2. Obtaining the Code¶
In the previous homework, we dealt with a streaming application that
compressed a video stream, and explored how to implement coarse-grain data-level parallelism
and pipeline parallelism using std::threads to speedup the application. For this homework,
we will use the same application and implement fine-grain, data-level
parallelism on a vector architecture; we will explore both auto
vectorization with the compiler and hand-crafted NEON vector intrinsics.
On you local machine, clone the
ese532_coderepository using the following command:git clone https://github.com/icgrp/ese532_code.git
If you already have it cloned, pull in the latest changes using:
cd ese532_code/ git pull origin master
The code you will use for homework submission is in the
hw4directory. The directory structure looks like this:hw4/ assignment/ Makefile common/ App.h Constants.h Stopwatch.h Utilities.h Utilities.cpp src/ App.cpp Compress.cpp Differentiate.cpp Filter.cpp Scale.cpp neon_example/ Example.cpp data/ Input.bin Golden.bin
We will now copy the
hw4directory into the Ultra96.
4.2.3. Environment Setup¶
4.2.3.1. Setting up Ultra96 and Host Computer¶
We have provided you with:
An Ultra96 board with a power cable and a JTAG USB cable
Please check SW3 as the Note below. 1 shuold be in the “off” position, and 2 should be in the “on” position.
2 USB-ethernet adapters
1 ethernet cable
1 SD card and an SD card reader
USB-C to USB 3.1 adaptor (for those of you who only have USB-C ports in your computer)
Note
Some of you might be receiving the boards disassembled. In that case, make sure you have set the board in SD card mode as follows:

Fig. 4.2 SD card mode. 1 is OFF and 2 is ON at SW3.¶
And also make sure you have properly connected the JTAG module as follows:
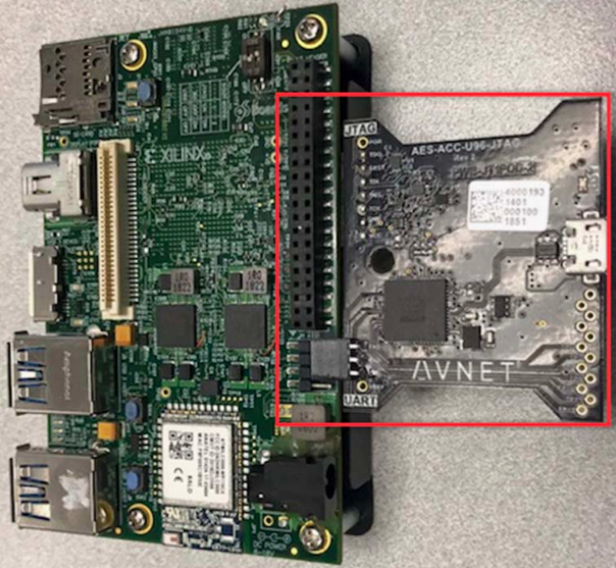
Fig. 4.3 JTAG module¶
Caution
Be cautious with ESD protection when using this board with Ultra96. The Ultra96 has exposed pins on the UART and JTAG headers. Be careful not to touch these pins or the circuits on the Pod when plugging the boards together - http://www.zedboard.org/product/ultra96-usb-jtaguart-pod
Your setup for this HW should look like Fig. 4.4.
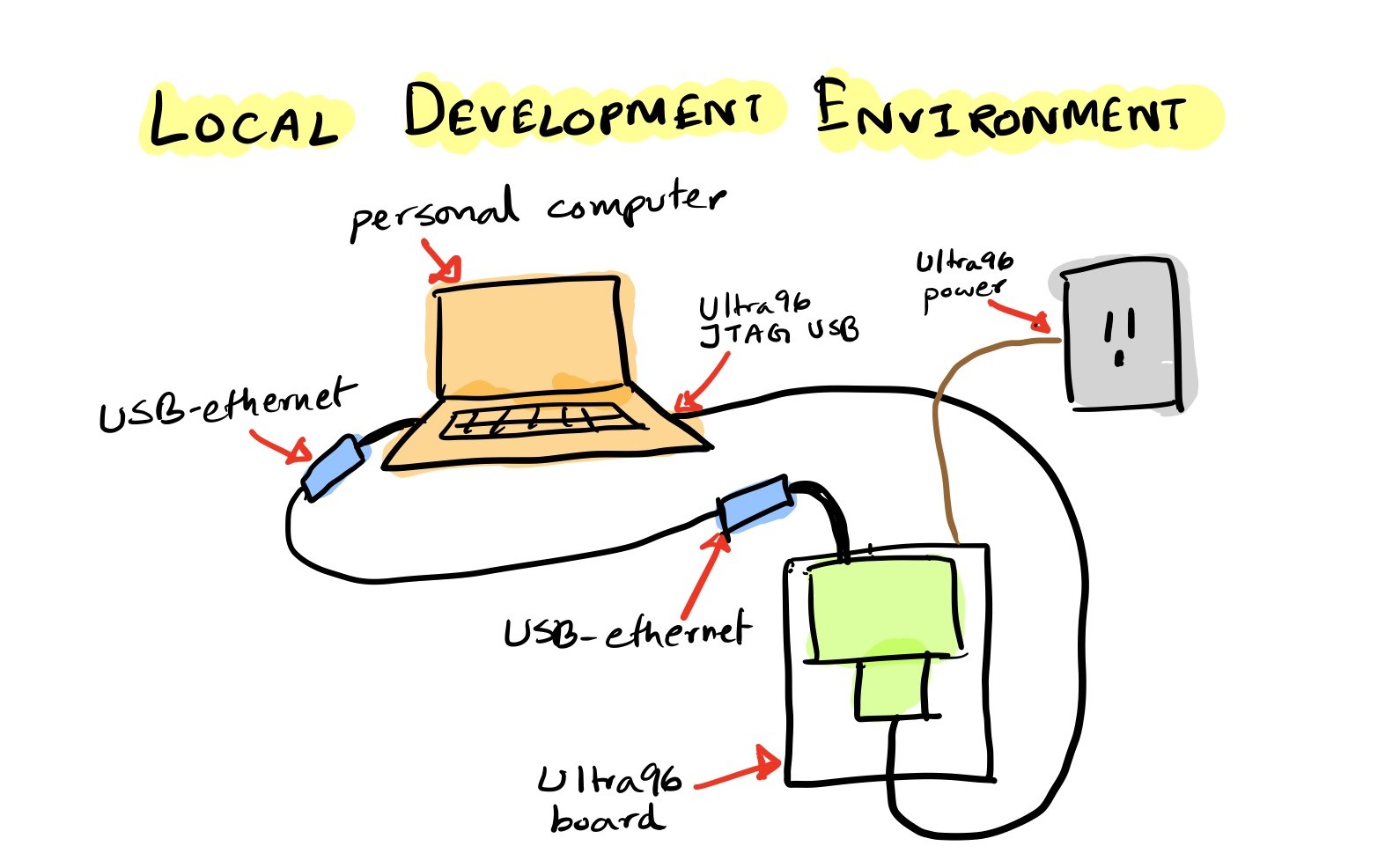
Fig. 4.4 Development Environment¶
4.2.3.2. Run on the FPGA¶
4.2.3.2.1. Write the SD Card Image¶
Download a sample SD card image for Ultra96 from here.
In the Reference Designs tab:
Click on the Ultra96-V2 – Vitis PetaLinux Platform 2020+ Vector Add (Sharepoint site) link.
Browse to 2020.2 -> Vitis_PreBuilt_Example -> u96v2_sbc_vadd_2020_2.tar.gz
Click on the download button
Then, unzip the file. The .gz file contains
sd_card.imgandREADME.txt.tar -xvzf u96v2_sbc_vadd_2020_2.tar.gz
Write
sd_card.imgto your SD card.In Ubuntu 20.04, you can use
Startup Disk Creator.You can also use Rufus or balenaEtcher.
Once you finish writing the image to the SD card, slide it into your Ultra96’s SD card slot.
4.2.3.2.2. Boot the Ultra96 (Environment - Personal Computer with Linux)¶
The instructions here are for users running Linux on their personal computers. For Windows users, skim these through, and go to Boot the Ultra96 (Environment - Personal Computer or Detkin Machines with Windows).
Make sure you have the board connected as shown in Fig. 4.4.
We will use two terminals on our host computer:
the first terminal will be used to copy binaries into the Ultra96
the second terminal will be used to access the serial console of the Ultra96
We will now open the serial console of the Ultra96. You can use any program like
minicom,gtktermorPuTTYto connect to our serial port. We are usingminicomand following is the command we use for connecting to the serial port:sudo minicom -D /dev/ttyUSB1
/dev/ttyUSB1is the port where the Ultra96 dumps all the console output. If you are on Windows, this will be something different, likeCOM4. When you want to get out ofminicom, useCTRL-A Z qAfter you have connected to the serial port, boot the board by pressing the boot switch as shown in Fig. 5.8.

Fig. 4.5 Switch for booting Ultra96¶
Watch your serial console for boot messages. Following is what ours look like:
�Xilinx Zynq MP First Stage Boot Loader Release 2020.1 Oct 17 2020 - 06:29:34 NOTICE: ATF running on XCZU3EG/silicon v4/RTL5.1 at 0xfffea000 NOTICE: BL31: v2.2(release):v1.1-5588-g5918e656e NOTICE: BL31: Built : 20:07:49, Oct 17 2020 U-Boot 2020.01 (Oct 17 2020 - 20:08:47 +0000) Model: Avnet Ultra96 Rev1 Board: Xilinx ZynqMP DRAM: 2 GiB . . . Starting kernel ... [ 0.000000] Booting Linux on physical CPU 0x0000000000 [0x410fd034] [ 0.000000] Linux version 5.4.0-xilinx-v2020.1 (oe-user@oe-host) (gcc version 9.2.0 (GCC)) #1 SMP Sat Oct 17 20:08:16 UTC 2020 [ 0.000000] Machine model: Avnet Ultra96 Rev1 [ 0.000000] earlycon: cdns0 at MMIO 0x00000000ff010000 (options '115200n8') [ 0.000000] printk: bootconsole [cdns0] enabled [ 0.000000] efi: Getting EFI parameters from FDT: [ 0.000000] efi: UEFI not found. [ 0.000000] Reserved memory: created DMA memory pool at 0x000000003ed40000, size 1 MiB [ 0.000000] OF: reserved mem: initialized node rproc@3ed400000, compatible id shared-dma-pool [ 0.000000] cma: Reserved 512 MiB at 0x000000005fc00000 . . . . Starting syslogd/klogd: done Starting tcf-agent: OK PetaLinux 2020.1 ultra96v2-2020-1 ttyPS0 root@ultra96v2-2020-1:~# The XKEYBOARD keymap compiler (xkbcomp) reports: > Warning: Unsupported high keycode 372 for name <I372> ignored > X11 cannot support keycodes above 255. > This warning only shows for the first high keycode. Errors from xkbcomp are not fatal to the X server D-BUS per-session daemon address is: unix:abstract=/tmp/dbus-2CuBS4BnDn,guid=63270a6bec61460191859caa5f9022fc matchbox: Cant find a keycode for keysym 269025056 matchbox: ignoring key shortcut XF86Calendar=!$contacts matchbox: Cant find a keycode for keysym 2809 matchbox: ignoring key shortcut telephone=!$dates matchbox: Cant find a keycode for keysym 269025050 matchbox: ignoring key shortcut XF86Start=!matchbox-remote -desktop dbus-daemon[641]: Activating service name='org.a11y.atspi.Registry' requested by ':1.0' (uid=0 pid=636 comm="matchbox-desktop ") dbus-daemon[641]: Successfully activated service 'org.a11y.atspi.Registry' SpiRegistry daemon is running with well-known name - org.a11y.atspi.Registry [settings daemon] Forking. run with -n to prevent fork
Note that near the end some messages spill, so just press Enter couple of times, and you see that you need to login. Login as
rootwith Password:root.root@u96v2-sbc-base-2020-2:~#
We will now enable ethernet connection between our Ultra96 and the host computer, such that we can copy files between the devices. Issue the following command in the serial console:
ifconfig eth0 10.10.7.1 netmask 255.0.0.0
Now in your second console in the host computer, first find out the name that has been assigned to the USB-ethernet device by issuing
ifconfigenx000ec6c4b500: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 10.10.7.2 netmask 255.0.0.0 broadcast 10.255.255.255 ether 00:0e:c6:c4:b5:00 txqueuelen 1000 (Ethernet) RX packets 213 bytes 32750 (32.7 KB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 249 bytes 25958 (25.9 KB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536 inet 127.0.0.1 netmask 255.0.0.0 inet6 ::1 prefixlen 128 scopeid 0x10<host> loop txqueuelen 1000 (Local Loopback) RX packets 570887 bytes 920673672 (920.6 MB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 570887 bytes 920673672 (920.6 MB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
In our case, the USB-ethernet device is
enx000ec6c4b500. Now issue the following command:sudo ifconfig enx000ec6c4b500 10.10.7.2 netmask 255.0.0.0
We have now assigned IP
10.10.7.1to our Ultra96 and IP10.10.7.2to our USB ethernet device connected to our host computer. You can test the connection by doingping 10.10.7.2from the Ultra96 serial console, and doingping 10.10.7.1from the host computer.Let’s copy
hw4directory to Ultra96:scp -r hw4 root@10.10.7.1:/home/root/
4.2.3.2.3. Boot the Ultra96 (Environment - Personal Computer or Detkin Machines with Windows)¶
Connect your ultra96 jtag usb to your computer. Also connect the ethernet-usb to ultra96 and the computer. Go to device managers and note down the serial port of the usb. In the example case, it’s COM4.

Fig. 4.6 Find the port¶
Download and install MobaXterm from here.
Start MobaXterm. Click Session in the left top corner and select Serial. Set the serial port as the one you found in the previous step and bps. In the example case, it’s COM4 and 115200. Click OK.
Boot the board by pressing the boot switch as shown in Fig. 5.8.
Note that near the end some messages spill, so just press Enter couple of times, and you see that you need to login. Login as
rootwith Password:root.root@u96v2-sbc-base-2020-2:~#
Click plus sign to open up the local machine’s session(new tab). Type
ifconfigand find out the ip address and netmask assigned to the USB-ethernet device. Following is the example:
Fig. 4.7 ifconfig to find out your local machine’s ip¶
Assign your Ultra96 an ip address on the same subnet as the USB-ethernet, e.g. from the previous step, the ip address of the local machine is
169.254.123.23and netmask is255.255.0.0. So, let’s assign the ultra96 to a ip of169.254.123.24(note that this is 24!) as follows:
Fig. 4.8 Connect you machine and Ultra96¶
Your devices are now connected. Go to the local machine’s tab and ssh into the Ultra96:

Fig. 4.9 ssh in to the Ultra96 and transfer files¶
You can view the files of the Ultra96 on the left hand side. You can easily drag and drop files from/to the local machine to/from Ultra96. Drag and drop
hw4folder on the left hand side to start this HW.
4.2.4. Running the Code¶
There are 3 targets, which we will build in the Ultra96. You can build all of them by executing
make allin thehw4/assignmentdirectory. You can build separately by:make baselineand./baselineto run the project with no vectorization ofFilter_verticalfunction.make neon_filterand./neon_filterto run the project withFilter_verticalvectorized (you will modify the vectorized code later).make exampleand./exampleto run the neon example.
The
datafolder contains the input data,Input.bin, which has 200 frames of size \(960\) by \(540\) pixels, where each pixel is a byte.Golden.bincontains the expected output. Each program uses this file to see if there is a mismatch between your program’s output and the expected output.The
assignment/commonfolder has header files and helper functions used by the four parts.You will mostly be working with the code in the
assignment/srcfolder.
4.2.5. Working with NEON¶
We are going to do some reading from the arm developer website articles and the NEON Programmer’s Guide in the following sections.
4.2.5.1. Basics¶
Read Introducing Neon for Armv8-a and answer the following questions. We have given you the answers, however make sure you do the reading! Knowing where to look in a programmer’s guide is a skill by itself and we want to learn it now rather than later.
1. Give an example of a SISD instruction.
add r0, r5
and any instruction from the ARM and Thumb-2 ISA quick reference guide
2. Give an example of a SIMD instruction.
add v10.4s, v8.4s, v9.4s
and any instruction from the NEON quick reference guide
3. What is the size of a register in a Armv8-A NEON unit?
128-bit
4. What does a NEON register contain?
vectors of elements of the same data type
5. How many sizes of NEON vectors are there and what are those sizes?
Two sizes: 64-bit and 128-bit NEON vectors
6. What is a lane?
The same element position in the input and output registers is referred to as a lane.
7. How many lanes are there in a uint16x8_t NEON vector data type?
8
8. How many lanes are there in a uint32x2_t NEON vector data type?
2
9. Can there be a carry or overflow from one lane to another?
No.
Read NEON and floating-point registers and answer the following questions:
1. How many NEON registers are there in ARMv8 and what are they labeled as?
32 128-bit NEON registers, labeled as V0-V31.
2. What is the difference between an operand labeled v0.16b and an operand labeled q0?
v0.16b is a vector register and has 16 lanes with each lane having 1 byte. q0 is a scalar register of 128-bits.
3. Are registered labeled b0, h0, s0, d0, q0 separate registers?
No, all of them belong to the same register v0. They are qualified names for registers when a NEON instruction operate on scalar data.
Read chapter four from the NEON Programmer's Guide and answer the following questions:
1. Where are the NEON Intrinsics declared?
in arm_neon.h header file
2. What NEON data type are you going to use for an unsigned char array of size 16 elements?
uint8x16_t. It will got to Q register.
3. When should you use intrinsics with ‘q’ suffix vs intrinsics without ‘q’ suffix?
When the input and output vectors are 64-bit vectors, don’t use intrinsics with ‘q’ suffix. When the input and output vectors are 128-bit vectors, do use intrinsics with ‘q’ suffix.
4.2.5.2. Coding with NEON Intrinsics¶
Read chapter four from the NEON Programmer’s Guide and answer the following questions. Use the Neon Intrinsics Reference website to find and understand any instruction.
Tip
This will help you in coding for your homework.
1. Which intrinsic should you use to duplicate a scalar value to a variable of type uint16x8_t?
vdupq_n_u16
2. Which intrinsic should you use to load 16 bytes from a pointer to a variable of type uint8x16_t?
vld1q_u8
3. Which intrinsic should you use to add two vectors of type uint8x8_t without overflowing?
vaddl_u8
4. Which intrinsic should you use to get the first 8 lanes (low) of a variable of type uint8x16_t?
vget_low_u8
5. Which intrinsic should you use to get the second 8 lanes (high) of a variable of type uint8x16_t?
vget_high_u8
6. Which intrinsic should you use to multiply two vectors of type uint16x8_t?
vmulq_u16
7. Which intrinsic should you use to multiply two vectors of type uint16x8_t and accumlate the result to a variable of type uint16x8_t?
vmlaq_u16
8. Which intrinsic should you use to shift a variable of type uint16x8_t to the right?
vshrq_n_u16
9. Which intrinsic should you use to cast the uint8_t values in a variable of type uint8x8_t to be uint16_t?
vmovl_u8
10. Which intrinsic should you use to cast the uint16_t values in a variable of type uint16x8_t to be uint8_t?
vmovn_u16
11. Which intrinsic should you use to join two uint8x8_t vectors into a uint8x16_t vector?
vcombine_u8
12. Which intrinsic should you use to store data from a uint8x16_t variable to a pointer?
vst1q_u8
4.2.5.3. Optimization:¶
Read section 2.1.10, 2.8, and chapter 5 from the NEON Programmer’s Guide.
Watch the talk: Taming ARMv8 NEON: from theory to benchmark results
Read (supplemental) Optimizing C Code with Neon Intrinsics
Read (supplemental) Coding for NEON
Read (supplemental) Neon Intrinsics Chromium Case Study
Read (supplemental) Program Optimization through Loop Vectorization